Featured High Torque (Square) Stepper Motors
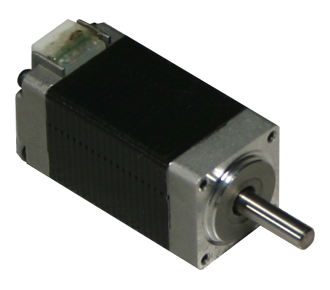
- Frame Size: NEMA 08
- Holding Torque: 2.5-4.9 oz-in.
- Current: 0.6-1.1A
- Frame Size: NEMA 11
- Holding Torque: 8.3-16.7 oz-in.
- Current: 0.2-0.7A
- Frame Size: NEMA 14
- Holding Torque: 9-59 oz-in.
- Current: 0.3-1.5A
- Frame Size: NEMA 15
- Holding Torque: 9-50 oz-in.
- Current: 0.4-1.6A
- Frame Size: NEMA 17
- Holding Torque: 24-111 oz-in.
- Current: 0.4-3.0A
- Frame Size: NEMA 17
- Holding Torque: 31-86 oz-in.
- Current: 0.2-1.2A
- Frame Size: NEMA 17
- Holding Torque: 38-77 oz-in.
- Current: 0.7-1.1A
- Frame Size: NEMA 23
- Holding Torque: 76-320 oz-in.
- Current: 0.7-3.5A
- Frame Size: NEMA 23
- Holding Torque: 180-270 oz-in.
- Current: 2.12A
- Frame Size: NEMA 23
- Holding Torque: 78-320 oz-in.
- Current: 0.7-3.5A
- Frame Size: NEMA 24
- Holding Torque: 153-431 oz-in.
- Current: 1.4-2.8A
- Frame Size: NEMA 34
- Holding Torque: 467-1700 oz-in.
- Current: 1.4-5.0A
- Frame Size: NEMA 34
- Holding Torque: 635-2140 oz-in.
- Current: 1.4-5.6A
- Compatible with Pacific Scientific N34 Series
- Frame Size: NEMA 34
- Holding Torque: 805-2725 oz-in.
- Current: 1.4-5.6A
- 25% More Torque than 34Y, 34N Series
- Compatible with Pacific Scientific K34 Series
- Frame Size: NEMA 34
- Holding Torque: 467-1700 oz-in.
- Current: 1.4-5.0A
- Frame Size: NEMA 42
- Holding Torque: 1625-4036 oz-in.
- Current: 4.25A
- Frame Size: NEMA 42
- Holding Torque: 1625-4365 oz-in.
- Current: 4.4-7.7A
- Compatible with Pacific Scientific N42 Series
- Frame Size: NEMA 42
- Holding Torque: 2090-5700 oz-in.
- Current: 4.4-7.7A
- 25% More Torque than 42Y,42N Series
- Compatible with Pacific Scientific K42 Series
|
|







.png)
.png)
.png)
.png)
.png)


.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)