We use cookies to make your experience better. To comply with the new e-Privacy directive, we need to ask for your consent to set the cookies. Learn more.
Gearbox vs Direct Drive Motors: When to Use Each in Motion Control Systems
Gearbox vs Direct Drive Motors: When to Use Each in Motion Control Systems
Mar 2026 Nicole Jones
Selecting the right motor configuration is critical to achieving optimal performance, efficiency, and reliability in industrial automation and motion control systems. One of the most common design decisions engineers face is whether to pair a motor with a gearbox or to use a direct drive motor. Each approach offers distinct advantages depending onapplication requirements such as torque, speed, inertia matching, efficency, and available space. Understanding when to use a gearbox versus a direct drive motor helps ensure proper system sizing, improved efficiency, and long-term equipment reliability.
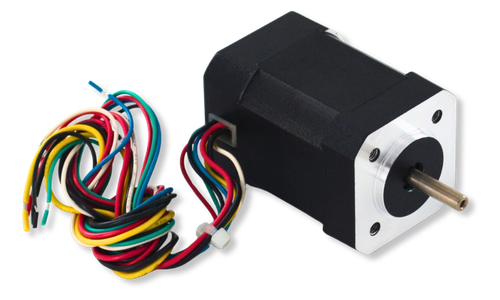
Understanding Direct Drive Motors
Direct drive systems eliminate the gearbox entirely by connecting the motor directly to the load. The motor iteself produces the required torque without mechanical reduction. Direct drive motors are typically designed with large diameters and high pole count to generate torque at low speeds.
Key Benefits of Direct Drive Systems
Higher Mechanical Efficiency
Because direct drive systems eliminate gear stages, they avoid the mechanical losses associated with gear meshing, friction, and lubrication. Gearboxes typically operate between 85% and 95% efficiency,depending on type and load conditions. Direct drive motors can therefore achieve higher overall system efficiency, particularly in continuous operation applications.
Reduced Maintenance
Gearboxes introduce components that require lubrication, sealing, and periodic maintenance. Over time, gears and bearings may become worn and require replacement.
Direct drive systems remove these components, resulting in:
- Fewer wear parts
- Reduced maintenance requirements
- Improved system reliability
Improved Precision and Responsiveness
Backlash - the small amount of play between gear teeth - can inroduce positioning errors in precision motion systems. Even high-quality gearboxes may exhibit small amounts of backlash.
Direct drive motors eliminate backlash entirely, making them ideal for high precision applications such as:
- Semiconductor manufacturing equipment
- CNC machines
- Robotics and pick-and-place systems
- Inspection and metrology systems
Space Efficiency in Certain Designs
Although direct drive motors can be larger in diameter, they may reduce the overall system footprint by eliminating the gearbox and associated mounting hardware. This simplified mechanical design can make integration easier in compact or highly-integrated equipment.
Power Loss Considerations
Gearboxes inherently introduce mechanical losses due to friction between gears, bearings, and seals. These losses translate into heat generation and reduce overall system efficiency. In high-duty-cycle applications where motors run continuously, even small efficiency differences can lead to significant energy consumption over time.
When to Use a Direct Drive Motor
Direct drive motors are often preferred when:
- Extremely precise positioning is required
- Backlash must be eliminated
- Maintenance needs to be minimized
- Maximum efficiency is desired
- System simplicity is a design priority
Typical direct drive applications include:
- Semiconductor manufacturing and testing
- Precision robotics
- Medical imaging equipment
- High-end CNC machinery
- Automated optical inspection (AOI) machines
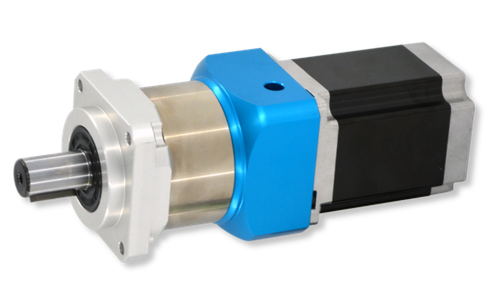
Understanding Gearboxes
A gearbox, also referred to as a gearhead or gear reducer, is a mechanical device that transmits power from a motor to a load while modifying torque and speed. A series of gears within the gearbox reduce motor speed and multiply output torque.
Key Benefits of Using a Gearbox
Torque Multiplication
One of the primary reasons to use a gearbox is torque amplification. By reducing output speed, a gearbox proportionally increases torque at the output shaft. For example, a 10:1 gear reduction decreases motor speed by a factor of ten while increasing output torque by approximately ten times (minus efficiency losses). This allows smaller motors to drive heavy loads instead of requiring oversized motors.
Applications that commonly benefit from torque multiplication include:
- Conveyor systems
- Packaging machinery
- Palletizers and material handling equipment
- Industrial automation systems
Inertia Matching
Proper inertia matching is essential for stable and responsive motion control. If the load inertia is significantly higher than the motor's rotor inertia, the system can experience instability, poor acceleration, and reduced control performance.
Gearboxes help reduce the effective load inertia reflected back to the motor. The relationship follows the square of the gear ratio:
Reflected inertia = Load inertia ÷ (gear ratio²)
By lowering reflected inertia, gearboxes allow motors to accelerate loads more efficiently and maintain better dynamic response.
Cost-Effective Motor Sizing
Using a gearbox often allows engineers to select smaller, lower-cost motors. Instead of specifying a large motor capable of prodicing high torque directly, designers can use a smaller high-speed motor combined with a gearbox to achieve the required torque output.
Power Loss Considerations
Gearboxes inherently introduce mechanical losses due to friction between gears, bearings, and seals. These losses translate into heat generation and reduce overall system efficiency. In high-duty-cycle applications where motors run continuously, even small efficiency differences can lead to significant energy consumption over time. Designers must weigh the energy savings from reduced losses against the higher upfront cost and size of direct drive motors.
When to Use a Gearbox
A gearbox is typically the better solution when:
- High torque is required from a relatively small motor
- The inertial load is significantly higher than the motor inertia
- The application operates at high motor apeeds but requires lower output speeds
- Cost constraints favor smaller motors with mechanical reduction
- The system benefits from compact motor sizes rather than larger direct-dive motors
Common gearbox-driven applications include:
- Conveyor systems
- Industrial packaging machines
- AGVs and material handling equipment
- Automated assembly systems
Engineering Trade-Offs
| Design Factor | Gearbox Solution | Direct Drive Solution |
| Torque Output | High torque from smaller motor | Requires larger motor |
| Efficiency | Slight losses from gearing | Higher mechanical efficiency |
| Precision | Some backlash possible | Zero backlash |
| Maintenance | Requires lubrication and service | Minimal maintenance |
| Cost | Lower motor cost, added gearbox cost | Higher motor cost |
| System Complexity | More mechanical components | Simpler mechanical design |
No single solution is universally better. The correct choice depends on application requirements, performance goals, and system constraints. Both gearbox-driven systems and direct drive motors play critical roles in modern motion control design. Gearboxes excel at torque multiplication, inertia matching, and cost-effective motor sizing, making them ideal for heavy-duty industrial automation applications. Direct drive motors, on the other hand, offer superior precision, reduced power loss, and minimal maintenance by eliminating mechanical transmission components.
By carefully evaluating torque requirements, efficiency goals, system inertia, and space constraints, engineers can determine the most effective approach for their motion control application. Choosing the right configuration ultimately leads to improved system performance, longer livespan, and optimized energy efficiency.