We use cookies to make your experience better. To comply with the new e-Privacy directive, we need to ask for your consent to set the cookies. Learn more.
Harmonics in Motion Systems
Harmonics in Motion Systems
Mar 2025, Automation Engineer
Understanding Motion Systems: The Spring-Mass Concept
One of the first concepts a mechanical engineering student is confronted with is the fact all motion systems can be characterized as a spring mass system. In it’s simplest form, engineering courses depict this as:
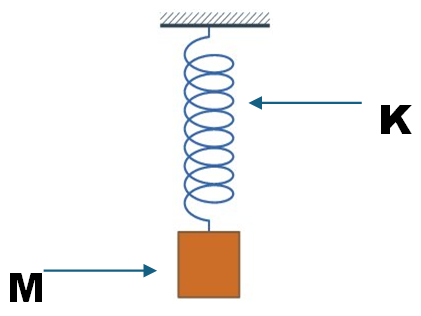
Where M is the mass and K is the spring constant. When the mass is moved in either direction, the spring attempts to bring it back to its equilibrium position. A common application experienced as a child is playing with the age-old slinky toy. When you cup your hands and move them up and down, you can get smooth motion of the coil. As you move faster, there will come a point where the slinky will become unstable and flops all over.
Real-World Examples of Resonance in Action
Where M is the mass and K is the spring constant. When the mass is moved in either direction, the spring attempts to bring it back to its equilibrium position. A common application experienced as a child is playing with the age-old slinky toy. When you cup your hands and move them up and down, you can get smooth motion of the coil. As you move faster, there will come a point where the slinky will become unstable and flops all over.
Another everyday example is driving your car. The body of the car is the mass, and the suspension system consists of 4 spring coils above the tires. At a certain speed, you may feel some enhanced vibrations. Go a little faster or slower and it seems to smooth out. These are examples of resonance in motion systems. Typically, this is not a severe problem except in rare instances.
The Tacoma Narrows Bridge Collapse: A Lesson in Resonance
One famous catastrophic case of resonance was in the case of the Tacoma Narrows Bridge in 1940.
Many engineering students have been shown this YouTube video of the failure to include the effects of resonance on a suspension bridge. Obviously, the bridge is the mass and the suspension cables are the springs. At some point, the vehicle traffic and wind shear caused a vibration. Once the resonant point was hit, the bridge became unstable and the stresses on the cables and roadway gave out.
How Shock Absorbers and Damping Reduce Vibrations
Going back to the car example, shock absorbers are added to the wheels to help smooth out the ride. It does not eliminate the shaking but causes it to be less noticeable. Similar technologies are used on bridges today. There are damping components on bridges as well as some steel plates that allow some motion laterally to mitigate the motion that can cause resonance. Again, this does not entirely remove the characteristics of resonance but does reduce the effects. If you have ever been stopped on a suspension bridge due to traffic, you can feel the bridge moving slightly.
Step Motor Resonance: Causes and Solutions
As mentioned previously in a discussion on resonance, motorized motion systems have similar characteristics. So how does this apply to motor driven systems?
In a step motor system, since a stepper motor system is a discreet increment positioning system, it is subject to the effect of resonance. Where the system is operated at this given frequency, it may begin oscillating. The primary resonance frequency occurs at about one revolution per second. Oscillating will cause a loss of effective torque and may result in a loss of synchronism and ultimately stalling of the motor. As discussed in another article, this will not lead to burning out the motor since by its design, a step motor limits the current to the motor. Settling time and resonance can be best dealt with by dampening the stepper motor's oscillations through mechanical means.
Mitigating Resonance in Stepper Motors
Mechanically, a friction or viscous damper may be mounted on the stepper motor to smooth out the desired motion. Other options are to add a gear reducer or a pulley reduction, add some inertia to the load, utilize microstepping or accelerate through the resonant zone. It must be noted that this will not eliminate the issue but may move it out the range at which you need to operate.
Resonance Challenges in Variable Frequency Drives (VFDs)
Variable frequency drives function slightly differently. As is the case with step motors, resonance in a VFD motor refers to a phenomenon where the motor experiences excessive vibration when its operating speed reaches a natural frequency of the system, typically caused by the variable frequency drive (VFD) altering the motor speed. This can damage components Like premature bearing wear, loose components, structural damage, increased noise, and potential motor failure if not addressed. This is more pronounced in constant horsepower loads like fans and pumps and can occur anywhere between 20 and 50% of the rated speed.
Practical Strategies to Minimize Resonance in Motion Systems
Some strategies to work around these effects include properly mounting the motor including damping materials, changing acceleration and deceleration rates to find a better response and utilize the skip frequency parameter on most VFD drives. This will avoid the resonant speed altogether.
As noted, resonance cannot be eliminated entirely, but its effect can be minimized.