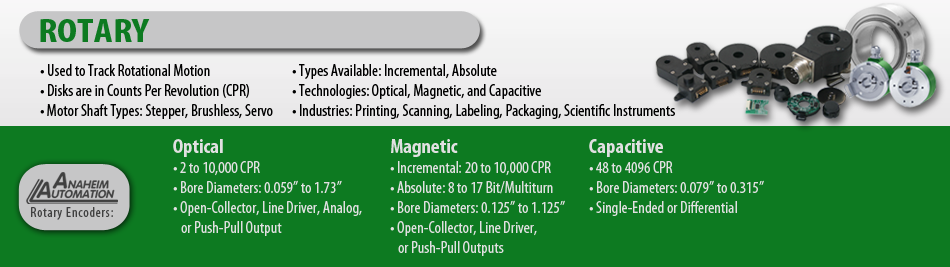
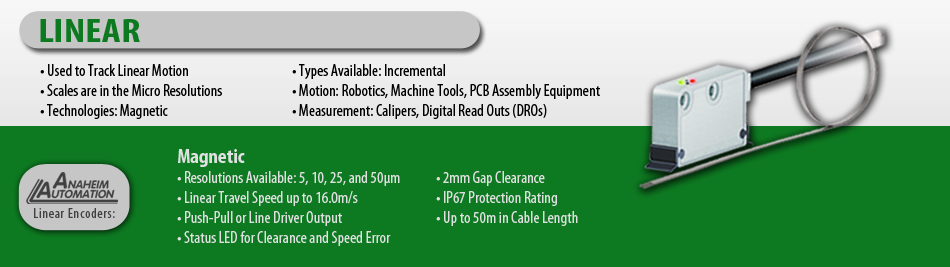
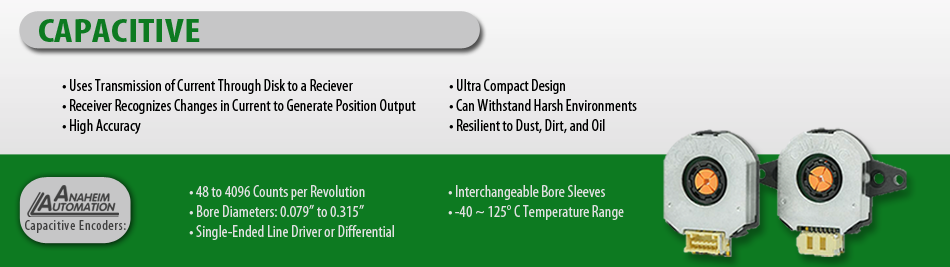
Encoders are a crucial component for a wide variety of applications requiring feedback information, such as speed, direction, or distance. This information is essential to many users in allowing for precise control of a system. Depending on the requirements of a given application, certain encoders may be more suitable than others. Optical encoders provide precision and accuracy, but may be more susceptible to environmental factors compared to other encoder types. Magnetic encoders are more robust, protected from dirt, dust, oil, and other environmental factors, but are not as sensitive as optical encoders. Capacitive encoders combine the best of the other two technologies, creating a rugged, reliable solution. Anaheim Automation offers an array of rotary optical, magnetic, and capacitive encoders, as well as magnetic linear encoders to suit all of your project needs. Shop by Movement or by Technology below.