 Ordering Information: Each Linear Magnetic Encoder system requires both a Read Head Sensor and a Scale. Optional Accessories are also available. Click each of the following for more information. For assistance in selecting the appropriate Linear Magnetic Encoder, please fill out our Application Data Sheet and submit it to our sales department.
Ordering Information: Each Linear Magnetic Encoder system requires both a Read Head Sensor and a Scale. Optional Accessories are also available. Click each of the following for more information. For assistance in selecting the appropriate Linear Magnetic Encoder, please fill out our Application Data Sheet and submit it to our sales department.
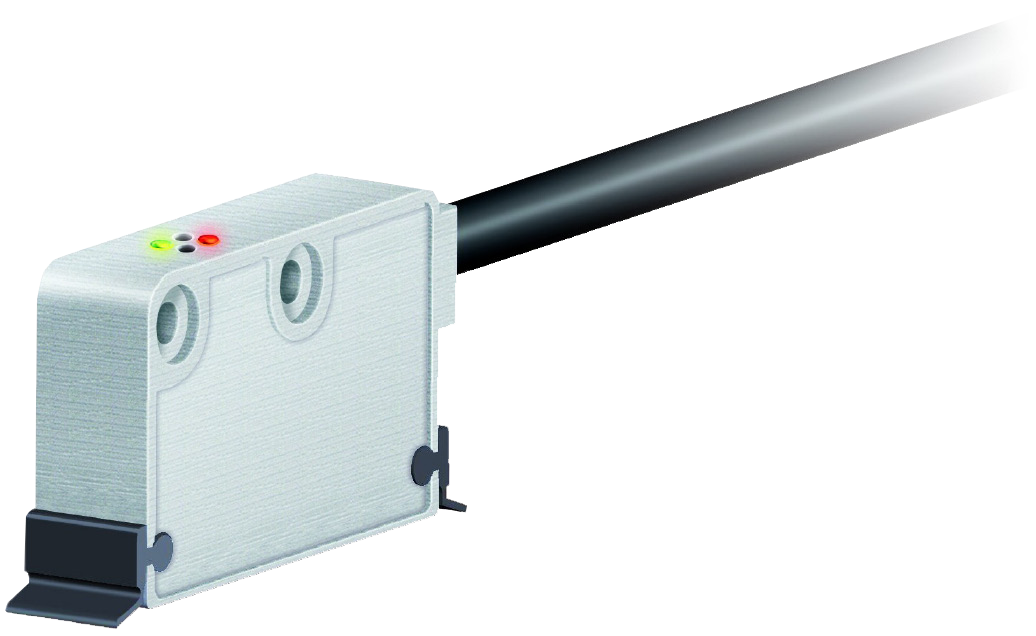
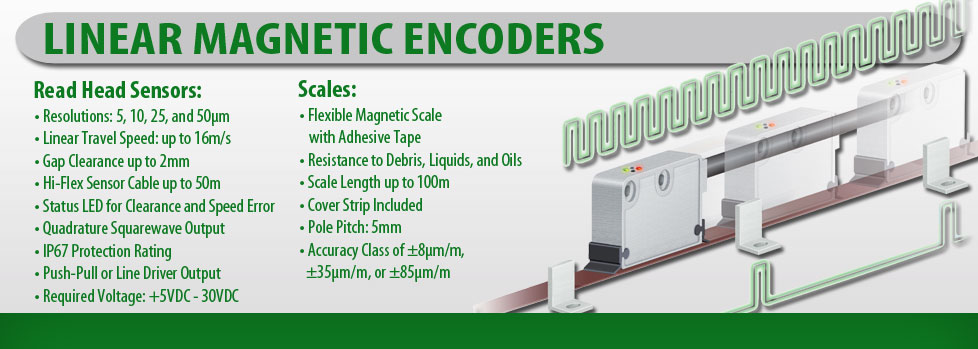
- Resolutions: 5, 10, 25, and 50µm
- Linear Travel Speed: Up to 16m/s
- Gap Clearance up to 2mm
- Hi-Flex Sensor Cable up to 50m
- Status LED for Clearance and Speed Error
- Quadrature Squarewave Output
- IP67 Protection Rating
- Resistant to Dust, Debris, and Liquids
- Push-Pull or Line Driver Output
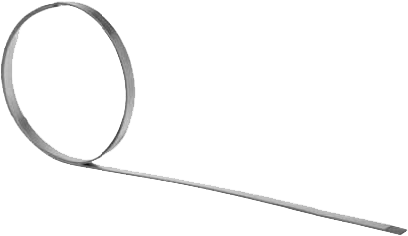
- Flexible Magnetic Scale with Adhesive Tape
- Resistant to Debris, Liquids, Dust and Oils
- Scale Length up to 100m
- Included Cover Strip
- Pole Pitch: 5mm
- Accuracy Class of ± 8μm/m, ±35µm/m, or ± 85μm/m
|
|